Zu Projektbeginn wurde nach verfügbaren Sensor-Systemen und Bausätzen recherchiert. Keines erfüllte alle Anforderungen an Genauigkeit, Robustheit, Konnektivität, Benutzerfreundlichkeit und Preis (Zielwert: ca. 300 € pro Modul). Daher wurde ein eigenes Sensor-Modul entwickelt – welche Sensoren sich in der Evaluation als geeignet erwiesen, ist dort beschrieben.
Aufbau und Komponenten #
Damit sich das Sensor-Modul leicht nachbauen lässt, setzen wir nur auf Bauteile, die in Deutschland einfach und günstig zu bekommen sind. Sie kommen als fertig aufgebaute Breakout-Boards: kleine Platinen, die schon alles Nötige mitbringen, um sofort zu funktionieren – man muss sie nur noch verbinden. So ist kein tiefes Elektronikwissen nötig, um das Modul selbst aufzubauen.:
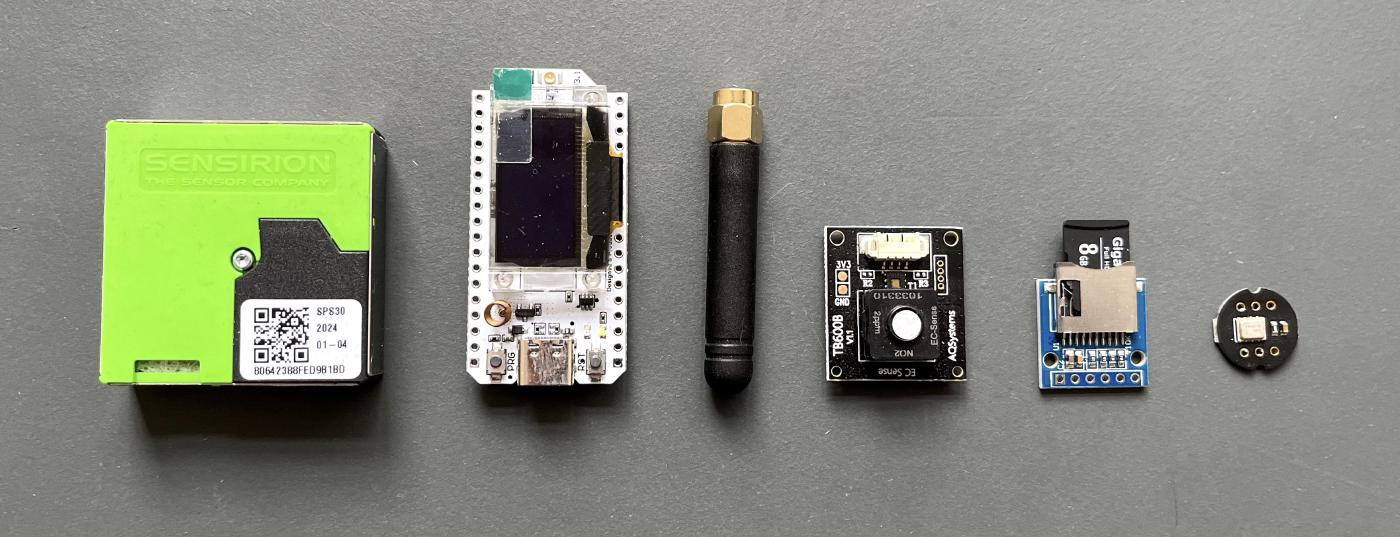
- Mikrocontroller: Heltec ESP32 LoRa mit OLED-Display, Funkübertragung (WLAN, LoRaWAN, Bluetooth) und Akku-Ladefunktion
- Feinstaubsensor: Sensirion SPS30 für PM1, PM2.5, PM10
- NO₂-Sensor: EC-Sense TB600B
- Mikrofon: MEMS-Mikrofon InvenSense INMP441 für Lärmmessung
- Speicher: SD-Karte zur lokalen Datensicherung
Modularer Aufbau & Öko-Design #
Gemeinsam mit dem Fraunhofer IZM wurde anstelle eines klassischen Leiterplattendesigns ein modularer Aufbau mit Breakout-Boards und flexibler Verkabelung realisiert. Dieser Ansatz erwies sich als:
- Kosteneffizienter in kleinen Stückzahlen
- Einfacher im Zusammenbau, auch für Laien möglich
- Reparaturfreundlicher durch einfachen Austausch einzelner Komponenten
- Flexibler für spätere Erweiterungen
Im Rahmen des entwicklungsbegleitenden Öko-Designs legte das IZM besonderen Wert auf ressourcenschonende, langlebige und wartungsfreundliche Bauweise.
Firmware #
Die Firmware wurde in C++ entwickelt und implementiert die Anbindung aller Hardwarekomponenten, das Auslesen der Sensoren, die Datenkonvertierung und das Versenden per LoRaWAN. Für die Lärmmessung wird der bewertete Schalldruckpegel nach dB(A) mittels Fast Fourier Transformation berechnet.
Messzyklus #
Während der Entwicklung zeigte sich ein Problem: Der Motor des Feinstaubsensors erzeugt ein Betriebsgeräusch, das die Lärmmessung verfälscht. Gleichzeitig benötigt der Sensor eine Aufwärmzeit. Die Lösung war ein gestaffelter Messzyklus:
- 10 Sekunden: Erfassung des Geräuschpegels (Feinstaubsensor noch aus)
- 10 Sekunden: Aktivierung Feinstaubsensor, Messung von Temperatur und NO₂
- 20 Sekunden: Aufwärmzeit Feinstaubsensor
- 20 Sekunden: Feinstaubmessung
- Kalibrierung, Komprimierung, Senden per LoRaWAN
- ca. 4 Minuten: Schlafmodus zur Energieeinsparung
Gehäuse #
Die Entwicklung des Gehäuses erforderte die Berücksichtigung vielfältiger, teils widersprüchlicher Anforderungen: mobiler und stationärer Einsatz, vollständiger Witterungsschutz bei gleichzeitiger Durchlüftung für die Luftsensoren, ungehinderte Schallübertragung zum Mikrofon, einfache Wartung und Schutz vor Vandalismus.
Erste Version #
Die ersten Entwürfe vereinten mobile und stationäre Nutzung in einem kompakten Gehäuse. Die Integration der Feinstaubsensoren führte jedoch zu erhöhtem Energiebedarf. Für die erste Fallstudie musste die Stromversorgung in ein separates Gehäuse ausgelagert werden. Diese Lösung erwies sich als problematisch: erhöhte Sichtbarkeit, Vandalismus-Gefahr und Anfälligkeit für Wettereinflüsse.
Partizipatives Redesign #
In einem partizipativen Designprozess wurden während der Fallstudie im Samariterviertel verschiedene Lösungsansätze gemeinsam mit den Teilnehmenden diskutiert. Das neue Gehäusekonzept umfasst:
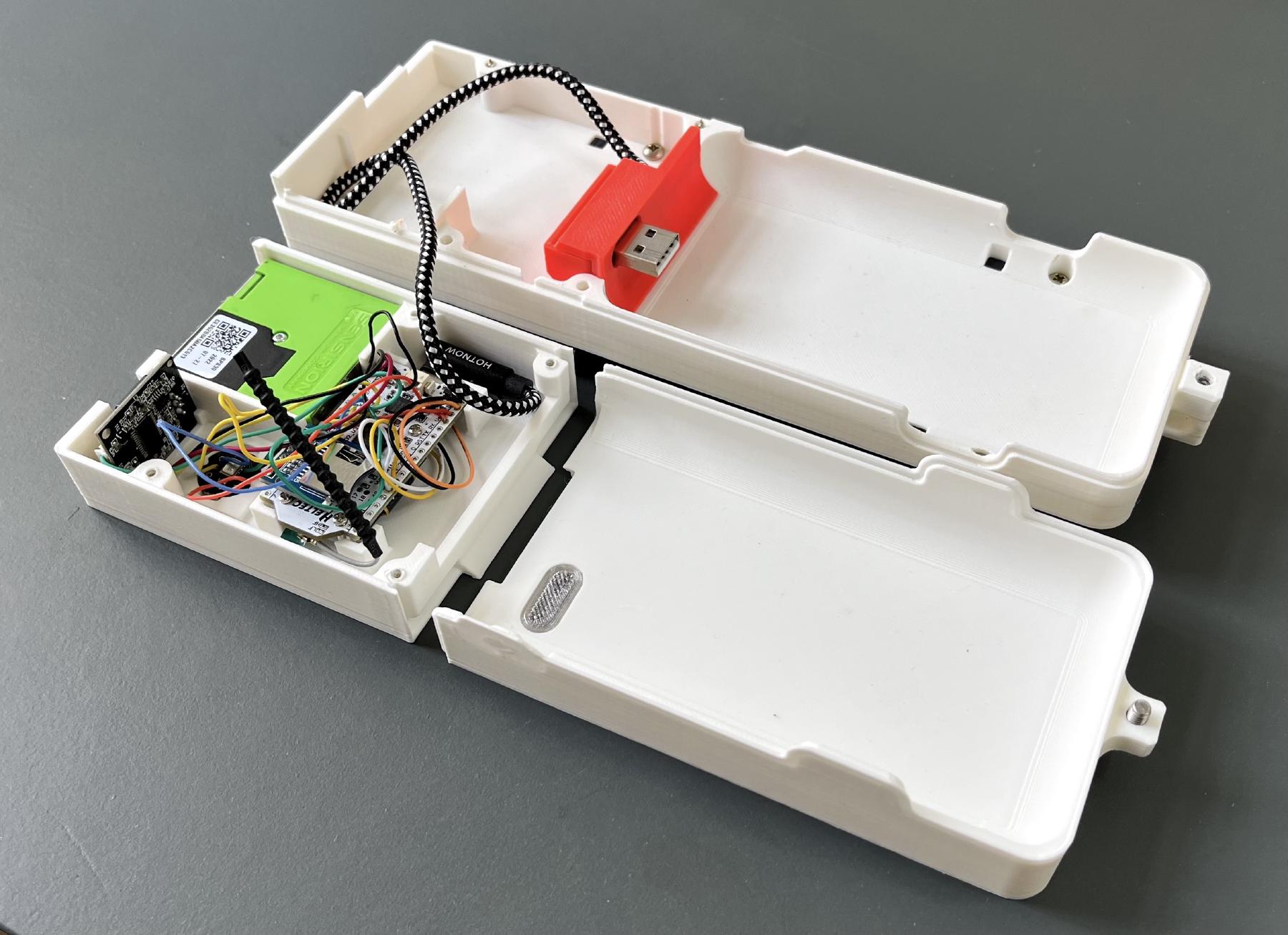
- Vereinfachtes dreiteiliges Design
- Hermetische Trennung von Elektronik und Powerbank
- Integrierte schwenkbare USB-Buchse für einfachen Akkuwechsel
- Unauffälligeres Erscheinungsbild zum Schutz vor Vandalismus
Fertigung #
Das 3D-Design erfolgte in Kooperation mit dem IZM, wobei alle Hardware-Komponenten modelliert wurden. Die Prototypenerstellung mittels 3D-Druck ermöglichte kurze Iterationszyklen.
Erhebliche Fertigungstoleranzen erforderten kontinuierliche Optimierung der Druckparameter. Die Anschaffung eines höherwertigen 3D-Druckers stellte schließlich konstante Qualität sicher. Das Gehäuse ist vollständig für handelsübliche Filament-3D-Drucker optimiert; die Sensoren werden eingeklickt und nur minimal verschraubt.
Feld-Manual #
Installation #
Die Sensor-Module werden typischerweise an Zäunen, Balkonen oder Fassaden montiert – hochkant, in etwa 1,5 bis 3 Metern Höhe. Die Wahl des Standorts beeinflusst die Messergebnisse erheblich: Abstand zur Straße, Höhe über dem Boden, Nähe zu Emissionsquellen, Sonneneinstrahlung und Belüftung spielen eine Rolle. Auch die Ausrichtung ist relevant: Das Mikrofon sollte zur Schallquelle (meist zur Straße) zeigen.
Für jeden Standort wird ein Installationsprotokoll ausgefüllt:
- Foto des Sensors mit GPS-Koordinaten
- Panoramafoto der Umgebung
- Angaben zu Höhe, Abstand zur Straße und Ausrichtung
- Beobachtungen zur unmittelbaren Umgebung
Diese Dokumentation ermöglicht es, Auffälligkeiten in den Messdaten im Kontext des Standorts zu verstehen.
Datenübertragung #
Die Messdaten werden per LoRaWAN (Long Range Wide Area Network) übertragen – ein Funkprotokoll mit hoher Reichweite bei niedrigem Energieverbrauch. Die Daten gelangen über „The Things Network" an das SensEm-Backend, wo sie validiert, aufbereitet und gespeichert werden.
Für die Übertragung müssen im Messgebiet LoRaWAN-Gateways installiert sein – typischerweise in Wohnungen von Teilnehmenden oder an strategischen Positionen (etwa in einem Kirchturm). In dichtbebauten Stadtvierteln zeigte sich, dass die Reichweite entgegen der theoretischen Spezifikationen oft auf wenige hundert Meter begrenzt war. Dies erforderte ein dichtes, sorgfältig geplantes Netz von Gateways.
Zur Unterstützung der Netzplanung wurde ein LoRaWAN-Scanning-Modus entwickelt: Während gemeinsamer Kiezbegehungen messen die Teilnehmenden mit einem Testgerät die Signalstärke an verschiedenen Punkten. Die Ergebnisse werden in der Plattform als interaktive Abdeckungskarte visualisiert.
Betrieb und Wartung #
Die Module werden mit einer integrierten 20-Ah-Powerbank betrieben. Die Akkulaufzeit beträgt je nach Witterung und LoRaWAN-Abdeckung etwa fünf bis zehn Tage. Kältere Temperaturen und größere Entfernung zum nächsten Gateway erhöhen den Energieverbrauch.
Die regelmäßige Wartung umfasst vor allem den Akkuwechsel. Die Teilnehmenden erhalten dafür einen Schlüssel für das Gehäuse, einen Ersatzakku und ein Ladegerät. Der Wechsel erfolgt über eine schwenkbare USB-Buchse, ohne das Gehäuse vollständig öffnen zu müssen. Für das Monitoring zeigt die Online-Plattform Signalstärke und Status jedes Sensors an; fällt ein Sensor aus, können die zuständigen Personen benachrichtigt werden.
Rollen im Betrieb #
Die Betreuung der Infrastruktur wird auf mehrere Schultern verteilt – Sensorpaten, Gateway-Paten und Supporter. Diese Rollen sind ausführlich unter Citizen Science & Beteiligung beschrieben.
Betriebserfahrungen #
Die Sensor-Module wurden in drei Fallstudien erprobt – von einer Kurzzeitmessung bis zu einer sechsmonatigen Langzeitmessung.
Winterliche Temperaturen reduzierten die Akkulaufzeit deutlich und erhöhten die Ausfallrate. Der Einsatz von teilweise redundanten Sensoren an den Messstandorten erhöhte die Datenqualität: Ausreißer und Ausfälle einzelner Sensoren konnten erkannt und kompensiert werden.
Die Langzeitmessung zeigte die Stabilität der Sensoren, aber auch Herausforderungen bei der Motivation der Teilnehmenden. Die regelmäßigen Wartungsaufgaben erforderten anhaltende Aufmerksamkeit über Monate hinweg.